Go's Named Types aren't Types
I always thought that the “types” that are created using Go’s type
keyword were, in some vague sense, new, unique, original; but in any
case separate and distinct types. It turns out, this is a misunderstanding.
I always thought that the “types” that are created using Go’s type
keyword were, in some vague sense, new, unique, original; but in any
case separate and distinct types. It turns out, this is a misunderstanding.
What does it take to stand up a minimal REST service in Go,
using only facilities provided by the standard library? This
is a useful fingering exercise, and also provides an opportunity
to dive a little deeper into the net/http package. The net/http
package can be a bit confusing at first, but once the appropriate
idioms have been identified, the resulting code is actually quite
compact and convenient.
How does one actually read a plain text file in Go? Some searching
through the standard library revealed the bufio.Scanner utility,
which seems to be the most convenient way to accomplish this task.
Let a be a Go slice. Under what conditions is the following
statement true: len(a) == 0?
Here is the situation: an application maintains an in-memory cache. The cache is accessed by two threads (goroutines) concurrently. The first one constantly tries to read from the cache: very busy. The other goroutine updates the cache, relatively rarely (maybe a few times an hour). What are some synchronization/locking methods and how do they compare?
Having done extensive programming in C, I am not particularly spoiled when it comes to idiosyncrasies of a language’s “string” type. Yet, Go’s string types keeps tripping me up — why does it all still have to be that complicated?
Go request handlers typically include a “context” value as their first argument:
func handler( ctx context.Context, ... ) {
...
}
In my experience, this convention is typically fastidiously followed, but
then nothing is ever done with that ctx argument. What is it really
for? Unfortunately, the description in the official
Go package documentation
is a bit cryptic, and the type implementation itself does not reveal
anything either (the default context is just an empty struct).
Properly understood, it’s actually a really convenient idiom; however,
its value is not so much in the context package itself, but in some
idioms in the code that use the package.
Imagine a parking lot, consisting of a long, linear strip of slots. Cars enter at one end and leave by the other. Let’s also stipulate that each arriving car takes the first available slot that it encounters, that is, it will park in the first empty slot that is nearest to the parking lot entrance. Cars arrive randomly, with a given, average interarrival time $\tau_A$. Furthermore, cars occupy each slot for a random amount of time, but all with a common average dwell time $\tau_D$.
If we number the slots, starting at the entrance, we may now ask the question: what is the probability that the slot with index $n$ is occupied?
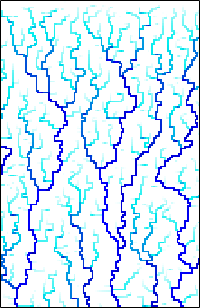
A while back, I looked at the Diamond-Square Algorithm for terrain generation. That is a purely procedural algorithm that only attempts to generate realistic looking landscapes, without trying to model any physical or geological processes. By contrast, we will now look at an algorithm to generate realistic river networks, which is based on a (simplified) model of geological erosion.
Imagine a bunch of wood chips randomly distributed on a surface. Now add an ant, randomly walking around amongst the chips. Whenever it bumps into a chip, the ant picks up the chip; if it bumps into another chip, it drops the one it is carrying and keeps walking.
How will such a system evolve over time?